
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
- 가우스곡선 #오차곡선 #확률밀도함수
- 수치표면모형
- TIMEOFWEEK
- 국제원자시의원점
- 기출문제 #기출문제분석 #반복출제 #측량및지형공간기술사
- Tasseled Cap
- 국제원자시의측정방법
- 비전 #목표 #추진전략
- 수치표고모형
- Tasseled Cap 변환
- 초분광이미지의분류
- ㅜ
- 경중률
- 제7차국가공간정보정책
- 제125회
- Hyperspectral
- 용어정리 #GPS오차원인 #구조적원인 #기하학적오차 #SA
- 초분광이미지
- GPSTIME
- 온맵 #국토지리정보원 #온맵제작
- GPSWEEK
- 경중률 #최확값
- 항공사진특수3점
- 사진의특수3점 #투영방법
- 초분광영상처리요소기술
- 국제원자시의정의
- 수치표고자료
- 측량및지형공간기술사 #기출문제 #논술문제
- 측량및지형공간정보기술사 #출제기준 #출제유형
- 측량및지형공간기술사
- Today
- Total
클라우드의 데일리 리포트
반송파 위상차 본문
1. 반송파 위상차
반송파 보정 위성 항법 시스템을 사용하면, 일반적으로 반송파 측정치는 코드 측정치보다 해상도(Resolution)가 훨씬 높으므로 이를 이용하여 위치를 계산할 경우 수mm~수cm 수준의 궤적 오차를 기대할 수 있다. 코드신호를 운반하는 반송파는 그 자체가 정현파로서 L1 파의 경우 약 19cm, L2 파의 경우 약 24cm 의 파장으로 위성과 수신기 간의 파장 개수를 측정함으로써 거리를 계산할 수 있는데 이와같이 위상차에 의해 간섭법으로 거리를 측정하는 방법이다.
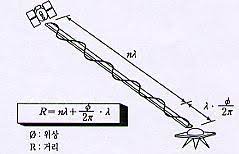
수신기에 마지막으로 수신되는 파장의 위성을 정확히 알 수 없으므로 이를 모호정수(Ambiguity)라 하며 수신기 1 대 만으로는 정확한 Ambiguity 를 결정할 수 없기 때문에 최소 2 대 이상의 수신기로 부터 정확한 위상차를 구한다.
1) GPS 신호의 종류
GPS 신호는 3개의 이진수 코드가 L1과 L2 반송파 위상에 변조되어 있다.

① L1 반송파
L1 신호는 GPS 수신기에서 가장 일반적으로 사용되는 신호입니다. 이 신호는 주로 위치 및 타이밍 정보를 제공합니다. L1 신호는 1575.42MHz 주파수에서 전송됩니다.
중심주파수 1575.42Hz = 10.23 * 154배, 파장 = 19cm
② L2 반송파
L2 신호는 L1 신호와 함께 사용되는 보조 신호입니다. L2 신호는 좀 더 정확한 타이밍 정보를 제공하며, 고도와 위치 정확도를 향상시키는 데 사용될 수 있습니다.
중심주파수 1227.60Hz = 10.23 * 120배, 파장 = 24cm
③C/A코드(Coarse Aquisition)
C/A코드(Coarse Aquisition)는 L1 반송파 위상에 변조되어 있다. C/A코드는 반복되는 1MHz 의사 불규칙한 잡음(Pseudo Random Noise; PRN) 코드이다. 이 잡음과 같은 코드는 L1 반송파 신호에 변조되어 1MHz 주파수대역에 걸쳐 스펙트럼을 전파한다. C/A코드는 매1,023비트(1,023회/초)를 반복한다. 각 위성에 대하여 서로 다른 C/A코드 PRN이 있다. GPS위성은 종종 각각의 의사 불규칙 잡음 코드에 대한 유일한 식별자인 PRN 번호에 의하여 구별되기도 한다.
④항법메시지 또한 L1 코드 신호에 변조되어 있다. 이 항법메시지는 GPS위성의 궤도, 시계보정량과 다른 시스템 파라미터를 설명하는 데이터 비트들로 구성되는 50Hz의 신호이다.
⑤P코드(Precise)는 L1과 L2 반송파 위상에 모두 변조되어 있다. P코드는 10MHz의 PRN코드이다. 기만(Anti-Spoofing; AS) 모드의 실행에서는 P코드는 Y코드로 암호화된다. 암호화된 Y코드는 각 수신기 채널에 대하여 비밀의 AS 모듈을 요구하며, 오직 암호키를 가진 허가받은 사용자만이 이를 이용할 수 있다.
2) GPS 측위의 원리
GPS를 이용한 측위방법에는 위성과 수신기 간의 전파 도달 시간차를 이용하여 위성과 수신기간의 거리를 구하는 코드신호 측정방식과 위성으로부터 수신기에 도달되는 전파의 위상을 측정하여 거리를 구하는 반송파신호 측위방식이 있다.
| 코드신호 측정방식(코드 측위) | 반송파신호 측정방식(간섭 측위) | |
| 원리 | GPS 신호의 코드를 측정하여 위치계산 | 반송파 신호의 위상변화를 측정하여 위치계산 |
| 특징 | 낮은 정확도 | 높은 정확도 |
| 오차범위 | 수 m | 수 cm |
| 신호처리 | 난수 코드의 시간 차이를 거리로 변환 | 신호처리 및 모호상수 추정 필요 |
① 코드신호 측정방식
GPS 코드 신호 측정 방식은 GPS 수신기가 수신한 GPS 신호의 코드를 활용하여 위치를 계산하는 방법입니다. 코드 신호는 GPS 위성에서 전송되는 복잡한 의사 난수 코드로 구성되어 있습니다. 수신기는 이 코드를 수신하여 시간 차이를 측정하고, 해당 시간 차이를 거리로 변환하여 위치를 계산합니다.
② 반송파신호 측정방식
GPS 수신기가 반송파 측정치 추적을 시작하며, 특정 시간 동안 누적된 반송파 위상 값을 제공하며, 초기의 반송파 싸이클 개수인 반송파 측정치에 포함되어 있는 미지정수를 알 수 있다면, 고정밀의 위치 정확도로 사용자의 위치를 구할 수 있다. 즉, 반송파 위상을 이용한 반송파 보정 위성 항법 시스템은 사용자의 초기 위치 외에, 반송파 측정치에 포함되어 있는 초기 미지정수를 찾아내야 한다.