
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- Hyperspectral
- 수치표고모형
- ㅜ
- 초분광이미지의분류
- 수치표고자료
- 초분광영상처리요소기술
- 제125회
- 용어정리 #GPS오차원인 #구조적원인 #기하학적오차 #SA
- 기출문제 #기출문제분석 #반복출제 #측량및지형공간기술사
- 수치표면모형
- 제7차국가공간정보정책
- 경중률
- Tasseled Cap 변환
- 국제원자시의측정방법
- 국제원자시의원점
- 경중률 #최확값
- GPSWEEK
- 초분광이미지
- 측량및지형공간기술사
- 측량및지형공간정보기술사 #출제기준 #출제유형
- 측량및지형공간기술사 #기출문제 #논술문제
- 가우스곡선 #오차곡선 #확률밀도함수
- 온맵 #국토지리정보원 #온맵제작
- Tasseled Cap
- TIMEOFWEEK
- 국제원자시의정의
- 항공사진특수3점
- GPSTIME
- 사진의특수3점 #투영방법
- 비전 #목표 #추진전략
- Today
- Total
클라우드의 데일리 리포트
관성항법장치(INS: Inertial Navigation System) 본문
1. 관성항법장치
관성항법장치는 항공기의 이동에 따라 달라지는 3축방향의 가속도를 적분하여 이동 거리를 측정하는 항법장치이다. 관성센서란 운동의 관성력을 검출하여 측정 대상인 움직이는 물체의 가속도, 속도, 방향, 거리 등 다양한 항법 관련 정보를 제공하는 센서로, 인가되는 가속도에 의해 관성체에 작용하는 관성력을 검출하는 것이 기본원리로 가속도계와 각속도계로 분류된다.

1) INS의 원리
비행체의 속도나 고도에 변화가 생기면 관성항법장치에 관성의 힘이 작용한다. 여기서 발생하는 가속도를 감지해 시간으로 계산해 속도를 구하고 다시 속도를 계산해 위치를 계산하게 된다. 비행하는 동안 이렇게 계속 속도와 위치를 구하면서 제어하기 때문에 자세를 유지하고 정해진 궤도를 이탈하지 않고 목표지점을 향해 비행할 수 있다.
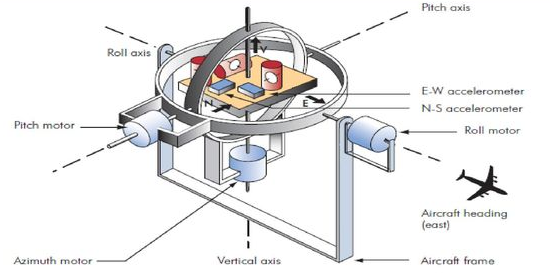
2. 관성항법장치 의 구성
관성항법장치는 종류에 따라 자이로스코프 가속도계만 있는 6축센서, 자이로스코프와 가속도계 및 지자기센서까지 포함한 9축센서도 있습니다. 각 센서는 관성을 이용해 물리량을 측정하는데, 이 장치로부터 이용할 수 있는 물리량은 아래와 같습니다.
가속도계는 가속도(m/s^2)를 측정하고 초기값을 계산할 때 중력 가속도를 분해하여 얼마나 기울어졌는지를 측정하는데 사용한다. 또한 속도와 이동거리를 가속도를 적분해서 사용할 수 있습니다.
자이로스코프는 각속도(rad/s)를 측정하고 시간당 몇도(degree)를 회전했는지가 필요할 때 사용합니다.
지자기 센서는 지자기(magnet)를 측정합니다. 자북을 기준으로 자기선속의 세기를 측정하여 자북을 기준으로 얼마나 틀어졌는지를 측정합니다.
1) 가속도 센서(accelerometer)
가속도 센서는 Accelerometer로 말 그대로 '가속도를 측정하는 센서'입니다. 가속도 센서가 3축이라 함은 센서가 3차원에서 움직일 때 x축, y축, z축 방향의 가속도를 측정할 수 있습니다. 가속도 센서는 가만히 정지한 상태에서 중력가속도를 감지하므로 z축 방향으로 -g만큼의 값을 출력합니다.

2) 각속도 센서(gyroscope)
자이로스코프는 대표적인 관성 센서로, 물체의 회전 변화량인 각속도(단위: rad/s)을 측정한다. 자이로스코프는 중력을 이용하여 코리올리 힘을 검출한다. 중력이 가해질 때 진동 속도가 변하는 것을 각속도로 계산해, 질량과 진동 속도를 통해 값을 측정하여 검출할 수 있다.

3) 지자기 센서(Magnetometer)
지자기 센서는 지구 자기장의 세기(자기선속)와 방향(자북을 기준으로 틀어진 각도)을 측정하는 센서이다. 물체가 바라보는 방향이 북쪽 방향과 정렬되어 지구의 자기력선과 일치할 때 센서의 측정값이 최대값·최소값을 가진다.

3. 관성항법장치 의 장단점
계산 속도가 빠르고 비행체의 운동에 따른 영향을 거의 받지 않기 때문에 안정적으로 시스템을 유지할 수 있다. 실제 항공기에 적용되는 INS의 경우 0.01초마다 위치와 속도, 자세 등의 정보를 제공한다. 악천후나 전파 방해 등의 영향을 받지 않는다는 장점이 있다. 운항(비행) 시간이 길어질 수록 약간의 오차가 발생하며 시간이 길어지면 질 수록, 장거리일 수록 오차 범위는 점점 커진다. 심지어 10시간 정도 비행하면 오차 범위가 수 킬로미터에 달할 수도 있다.
| 장점 | 단점 | ||
| 자체 위치 계산 | INS는 외부 신호 없이도 위치 및 이동 경로를 계산할 수 있음 |
초기 정확성 | 출발 시점의 초기 정확성에 영향을 받음 |
| 외부신호 불필요 | GPS나 지상 무선망에 의존하지 않음 |
누적오차 | 시간이 지남에 따라 오차가 누적되며, 긴 여정에서 위치 정확성 감소 |
| 운용환경 | 지상, 해상, 공중, 우주 등 다양한 환경에서 사용 가능 |
비용 | 고성능 INS 시스템은 비용이 높을 수 있음 |
| 오차보정 | GPS와 함께 사용 가능하여 오차 보정 가능 |
정밀성 | 고정밀 INS 시스템은 대형이고 무거울 수 있음 센서의 정확성과 안정성에 따라 성능 변동 |